Simulation-in-the-loop for Agile Control in Unstructured Environments
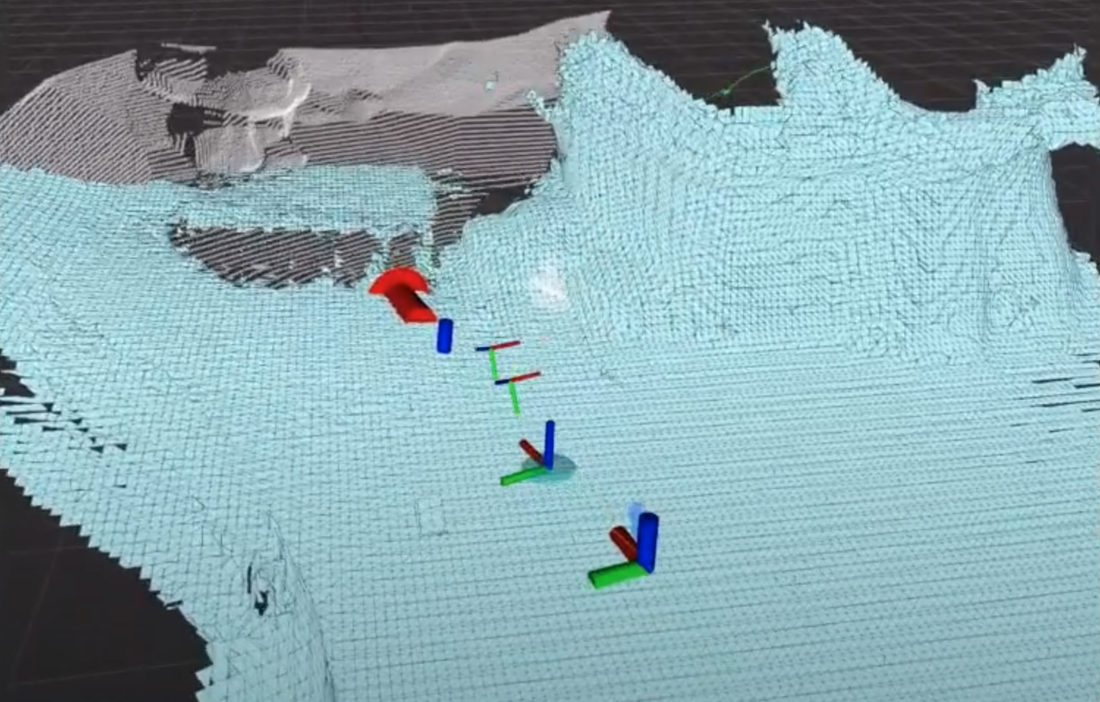
high-speed trajectory generation for a scale-model ground vehicle over 3D terrain using simulation-based control prediction and stochastic optimization
About
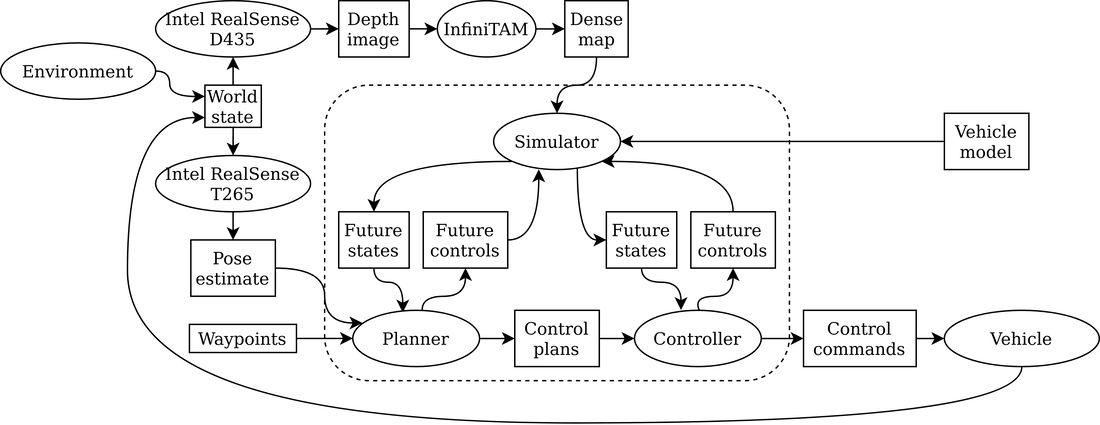
This work is primarily focused on the challenge of quickly navigating an unknown, cluttered, unstructured environment with a dynamic robot platform. This challenge is inherently very nonlinear and so a navigation solution which holistically takes advantage of the full expressiveness of the systems involved is desired to meet it. This can be achieved by a real-time, high-dimensional vehicle controller which utilizes dynamic vehicle models and high-fidelity perception in a closed-loop manner.
However, real-time, high-dimensional problems call for computationally expensive solutions, so navigation methods which utilize performant software to guide the vehicle along an optimal trajectory in the face of uncertainty, such as multi-threaded stochastic trajectory optimization, are required. Furthermore, guiding a dynamic vehicle in an unknown, unstructured environment necessitates efficient, high-fidelity perception, including high-speed, detailed mapping and precise localization, as well as hardware acceleration where possible.
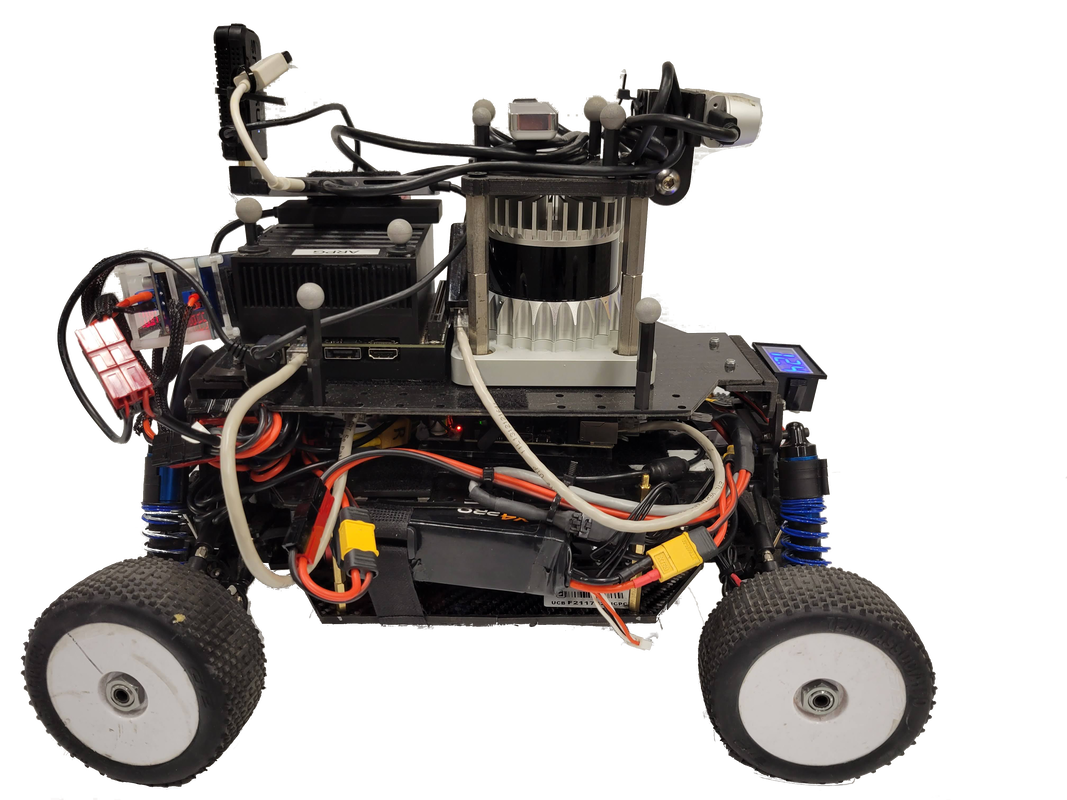
This work is experimentally validated on a 1/8th-scale car navigating over 3D terrain in a previously-unknown, unstructured environment.