Research Interests
field robotics | machine learning | autonomous navigation | computer vision
Projects
MARBLE: MULTI-AGENT AUTONOMY WITH RADAR-BASED LOCALIZATION FOR EXPLORATION
Funding: DARPA Subterranean Challenge
Timeline: August 2019 - February 2021
My contributions: absolute visual/thermal/chemical/RF object detection/localization,
algorithmic- and machine learning-based motion planning
Funding: DARPA Subterranean Challenge
Timeline: August 2019 - February 2021
My contributions: absolute visual/thermal/chemical/RF object detection/localization,
algorithmic- and machine learning-based motion planning
|
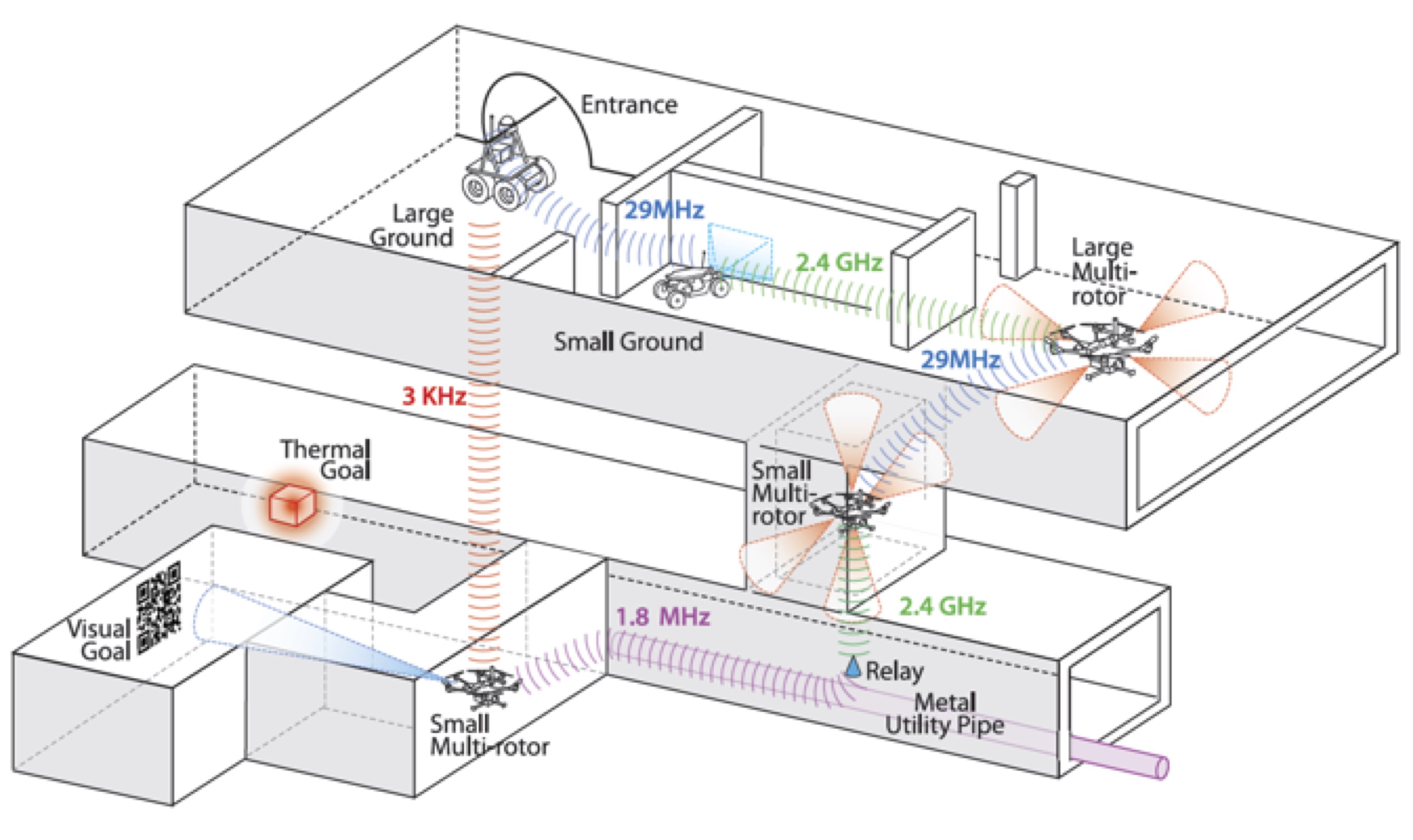
Team MARBLE has taken on DARPA's challenge to develop innovative technologies to augment operations in environments which exhibit unstable and degraded terrain, complex obstacles, and limited communication capabilities. We have fielded many mobility, low-level control, path planning, perception, multi-modal object detection, and communication technologies to effectively compete in the SubT Challenge.
|
|
Life-Long Learning for Motion Planning by Robots in Human Populated Environments
Funding: NSF NRI
Timeline: September 2018 - August 2021
My contributions: motion planning in stochastic environments
Funding: NSF NRI
Timeline: September 2018 - August 2021
My contributions: motion planning in stochastic environments
We aim to facilitate the safe integration of robots into our daily lives. We do so by developing long-term learning algorithms for human-aware (stochastic) motion planning and context-aware trajectories and interactions with humans.